
Dziennik prac do projektu Xrometr

Finalizacja projektu!
Mamy to! Miniaturowy, wielofunkcyjny czujnik do sterowania wyświetlaczami, prowadzenia haptycznych
telekonferencji i jednoczesnej obsługi interfejsów VR i AR. Urządzenie będzie posiadać moduł łączności bezprzewodowej oraz oprogramowanie pozwalające na sterowanie smartfonem, goglami VR lub ekranem telewizora dzięki ruchom dłoni oraz lokalizacji w danej przestrzeni.
Wykonanie projektu zakłada symultaniczną pracę zarówno nad urządzeniem jak i nad z tzw. helpdeskiem i społecznością deweloperską. Dzięki takiemu kompleksowemu rozwiązaniu, wykorzystaniu wieloletniego know-how w tworzeniu narzędzi/urządzeń multimedialnych z użyciem technik proceduralnych animacji 3d i 2d oraz databendingu powstanie pierwsze wielofunkcyjne, wielosystemowe urządzenie do sterowania zarówno wyświetlanymi treściami na każdym rodzaju wyświetlacza, ale i pozwalającym na zastąpienie pilotów sterujących w goglach VR














W wyniku badań czujników stereoskopowych po testach dokonanych na czujniku Oak-D potrzebna jest zmiana optyki urządzenia. W celu zwiększenia uniwersalności urządzenia pod kątem pracy z laserowymi skanami 3D niezbędna jest zmiana obiektywu z obiektywy 40 stopni na szerokokątny (typ W). Owy obiektyw będzie dostępny dopiero od końca kwietnia 2022 – https://shop.luxonis.com/collections/beta-store/products/oak-d-w


Panda3d-Artoolkit-test

Oprócz badań nad chmurami punktów 3D, próbujemy nowych technologii składania meshy tj. – fotogrametria.
Poniżej pokazujemy przykład skanowania pluszowej zabawki za pomocą 3D Live Scanner
(aplikację można pobrać na Google Play Store)



Zmiana strategii promocyjnej oraz produkcyjnej urządzenia XRometr.
-
wykonać testowe stanowisko do skanów i prezentacji studium przypadku na targach dostosowane do skany 3D i technologi LiDAR (tutaj zwiększenie wydatku stoisko)
-
Testy terenowe na zaawansowanych znacznikach AR i QR pokrywających przedmioty i przestrzenie w celu nauki naszego urządzenia dostosowywana zapisu chmur punktów do realnej przestrzeni oraz ułatwianie skanu (zwiększenie wydatku drukarka specjalistyczna)
-
Wytworzenie systemu optymalizacji rozbudowanych i ciężkich skanów 3D na potrzeby sztucznej inteligencji w naszym urządzeniu (usługa programistyczna nr 1) oraz możliwość wyświetlania efektów w standardzie XR czyli na goglach VR lub na smartfonie.




10 mm
10 mm
20 mm
20 mm
Na spotkaniu ze specjalistą z firmy Capnor Polska dyskutowaliśmy o sposobach wizualizacji chmur punktów.
Branża projektowa, architektoniczna jak i podwykonawcy końcowych prac bardzo poszukują narzędzi interaktywnych,
Pozwalających na wyświetlanie w czasie rzeczywistym obrazów cyfrowych nakładających (augmented reality),
Ale posiadających takie parametry jak osadzenie w stosunku do innych fizycznych przedmiotów w otoczeniu czy okluzja.

e57

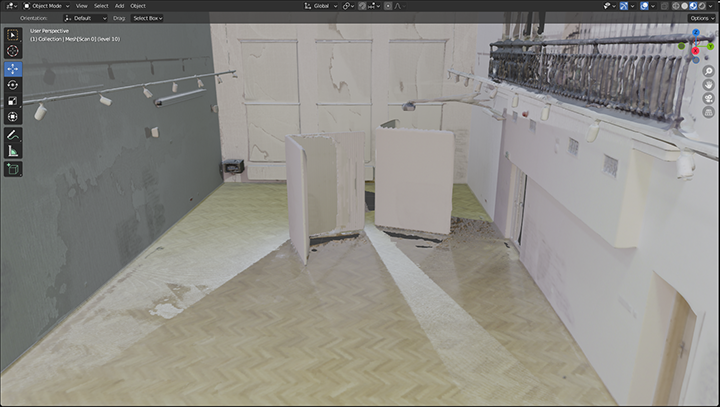
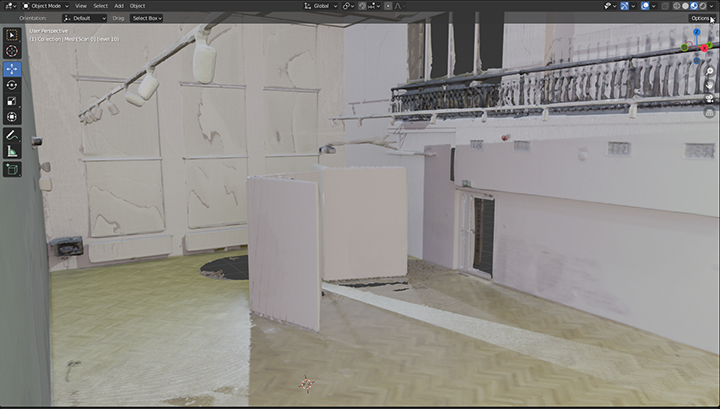
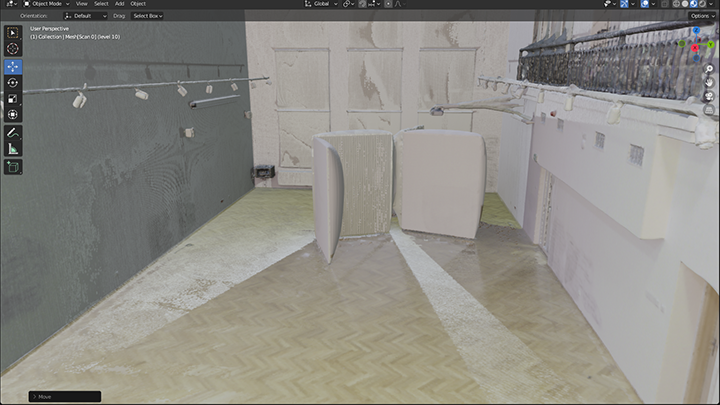
Próby uzyskania modelu z trzech skanów wykonanych na wysokości podłogi:




Używając biblioteki pythonowej opencv oraz depthai udało się stworzyć skrypt który generuje stereoskopowy obraz z dwóch kamer czarnobiałych z sensora oakd. Do wytworzenia została wykorzystana metoda hstack układająca automatycznie oba obrazy obok siebie tak aby łatwiej je było oglądać za pośrednictwem gogli VR. Dodatkowo używając metody addWeighted i streamu z kolorowej kamery znajdującej się idealnie po środku sensora okazało się że można koloryzować obraz stereoskopowy i uzyskać bardziej żywy passthrough niż ten z gogli oculus Quest. Następny etap przewiduje testy na urządzeniu Raspberry pi4 oraz podłączonym do niego małym ekranie 4:3 aby zdeterminować możliwość używania małych ekraników bezpośrednio w goglach typu smartphone VR.

Prace nad chmurami punktów – pliki e57 oraz panoramami
Ostatnie dni pracy poświęcamy pracy nad uzyskaniem jak najlepszej tekstury, aby model jakim będziemy operować był odzwierciedleniem świata realnego.
Okazuje się, że już bardzo dobre efekty możemy uzyskać dzięki zapisowi punktów kolorystycznych z samej chmury:

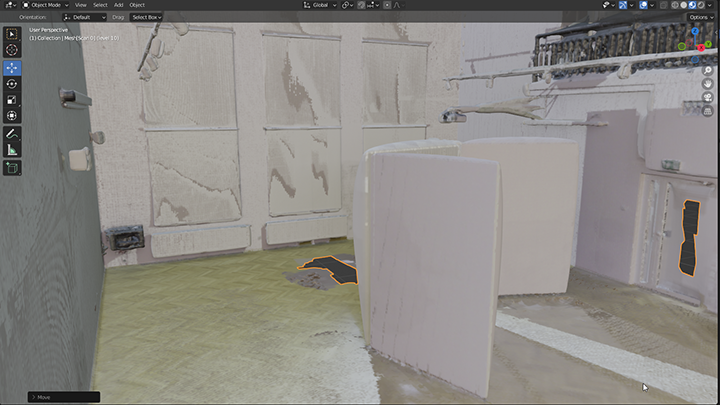
Próby uzyskania tekstury przez „projekcję sferyczną” – niestety na razie nie dają rezultatów (układ map UV nie jest na tyle zgodny, by móc dopasować panoramę do modelu):


Prace nad chmurami punktów – pliki e57
Wirtualny spacer w Mozilla Hubs: https://hubs.mozilla.com/PgJn38G/granular-thoughtful-camp



Prace nad opracowaniem jak najlepszej tekstury z chmury punktów bez panoram




Logo – Skakun

Design by Maciej Gniady
W trakcie testów nad bibliotekami OpenCV i depthai w środowisku pythona zostały przetestowane funkcje wykrywania punktów kluczowych (feature detection) w urządzeniu OAK-d. Zostały wygenerowane dwa źródła wideo pochodzące z monochromatycznych kamer stereo. Lewe i prawe źródło zostało przeanalizowane algorytmami Shi-Tomasi i Harris feature tracker w celu znalezienia odpowiednich punktów do śledzenia. W dalszych próbach zdobyte doświadczenie zostanie wykorzystane do śledzenia przemieszczenia pomiędzy kolejno zarejestrowanymi klatkami obrazu wideo.


Model 20 mm

Model 20 mm


Model 50 mm

Model 50 mm


Model 100 mm

Model 100 mm

Rozmieszczone skanery podczas dokładnego pomiaru laserowego pomieszczenia

Rozmieszczone skanery podczas dokładnego pomiaru laserowego pomieszczenia

Chmura punktów 100 mm

Chmura punktów 100 mm

Chmura punktów 100 mm

Model z chmury punktów 100 mm

Model z chmury punktów 100 mm

Model z chmury punktów 100 mm

Chmura punktów 20 mm

Chmura punktów 20 mm

Chmura punktów 20 mm

Model z chmury punktów 20 mm

Model z chmury punktów 20 mm

Model z chmury punktów 20 mm

Testy w przestrzeni wirtualnej:
https://hubs.mozilla.com/ho5eidU/granular-adept-outing/

UP – Galeria

UP – Galeria

UP – Galeria
Dzisiaj powstało logo do projektu XRometr:
Xrometr #1
XRometr #2


